V-Sidoアルファ版インストールガイド(Ver.0.2)
V-Sido Ver.0.2とKinectを組み合わせて使用する方法に関して説明します.
※ OpenNIのインストールは,ここや
ここなどのページを参考に,自分の環境に合わせて行ってください
※ Rs232c - USB変換ケーブルはお使いのOSに合わせてセットアップを行ってください.秋月の製品の場合,ドライバは ここで手に入ります.
図のようなウィンドウが現れたら,実験成功です.
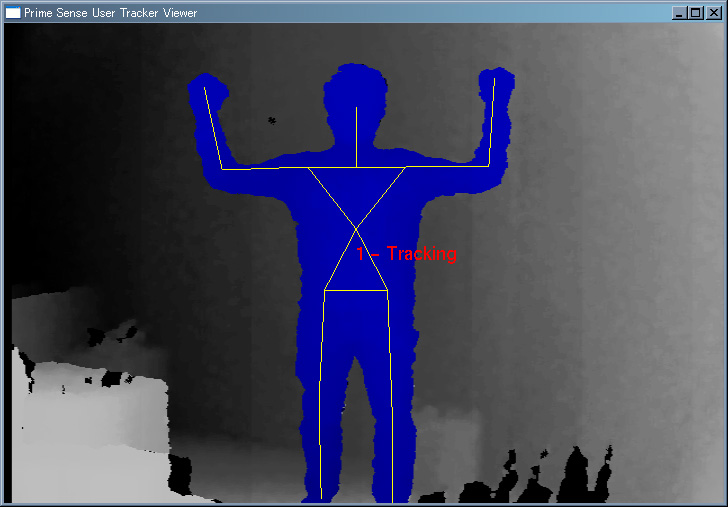
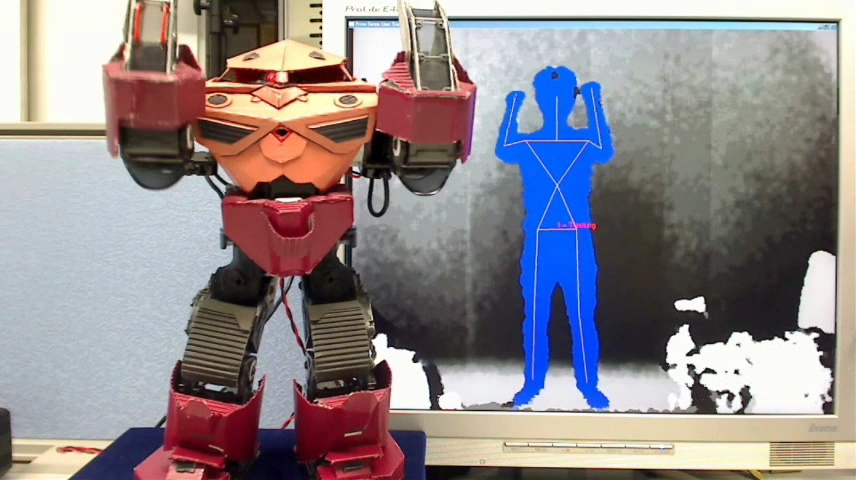
【Kinect NiUserTracker】
つづいて,キャリブレーションを行います. Kinectの前で,上図のようなポーズ(キャリブレーションポーズ)をとると,しばらくして自分の像に関節構成を示す線が描かれます. ここまでがうまくいかない場合は,OpenNIやKinectドライバの導入がうまくいっていない可能性があります. 再度,解説サイトなどを参考にインストールしてください.
※ プログラムが立ち上がらない場合,.NETフレームワーク3.5
が正しくインストールされているか確認して下さい.
※ プログラムを終了する際には,各ウィンドウについて右上の終了ボタンを押してください.
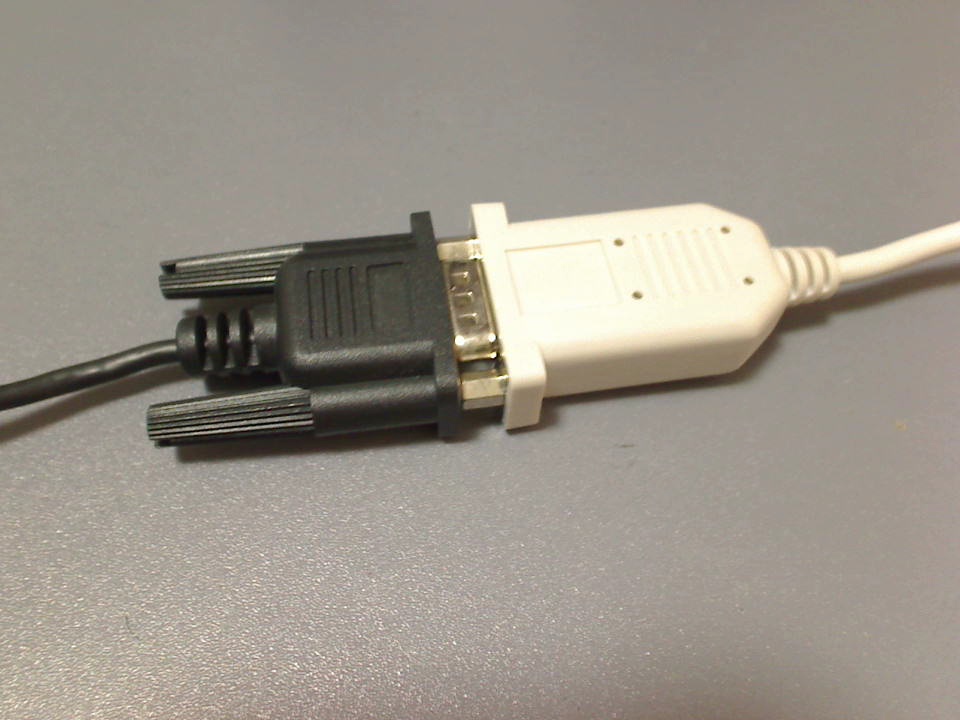
【RS232c - USB変換ケーブル】
※Kinectからシミュレータまでの同期に成功していて,かつロボットが動かない場合,RS232c-USB変換ケーブルが奥まで刺さってなかったり,認識できてない可能性があります.一度ケーブルを
抜き差しして,プログラムを再起動してください.
■注意事項■下準備
V-Sidoを動作させるためには,以下の要件を満たす必要があります.- 対応OS: Windows XP / Vista /7 32bit版(※64bit版は非対応)
- 必須ソフト:.NETフレームワーク3.5のインストール
- 必須ドライバ:OpenNIのインストール
- 対応ロボット:hpi社製 GR-001(RS303,304)
- ロボット接続ケーブル:RS232c - USB変換ケーブル(秋月電子通商)
- Kinect:USB接続ケーブル付きのもの(Amazon)
※ Rs232c - USB変換ケーブルはお使いのOSに合わせてセットアップを行ってください.秋月の製品の場合,ドライバは ここで手に入ります.
■Kinectの動作テスト
OpenNIが正しくセットアップされたかどうかを確かめるために,OpenNIのサンプルを起動してみてください.- Kinectをコンピュータに接続
- スタート>すべてのプログラム>OpenNI>Samples>Samples Directory
- 開いたフォルダの Release/NiUserTracker.exe を起動
【Kinect NiUserTracker】
つづいて,キャリブレーションを行います. Kinectの前で,上図のようなポーズ(キャリブレーションポーズ)をとると,しばらくして自分の像に関節構成を示す線が描かれます. ここまでがうまくいかない場合は,OpenNIやKinectドライバの導入がうまくいっていない可能性があります. 再度,解説サイトなどを参考にインストールしてください.
■V-Sidoの起動テスト
V-Sidoの最新版(Ver.0.2)のインストールはファイルを適当な場所に解凍するだけで行えます.アンインストール時も,フォルダごと削除して問題ありません. 以下で,KinectとV-Sidoの連動テストまで行います(実機ロボットはまだ使いません).- V-Sido(Ver.0.2)をダウンロードする
- ダウンロードしたv_sido0.2.zipを任意の場所に解凍する
- v_sido0.2/bin/v_sido.exeを起動する
- Kinectをコンピュータに接続する
- 「簡単接続」ボタンを押す(シミュレータが立ち上がる)
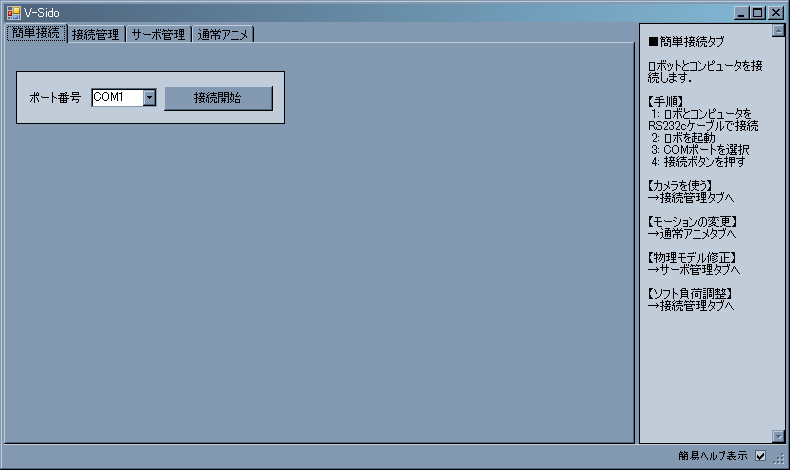
【起動画面】
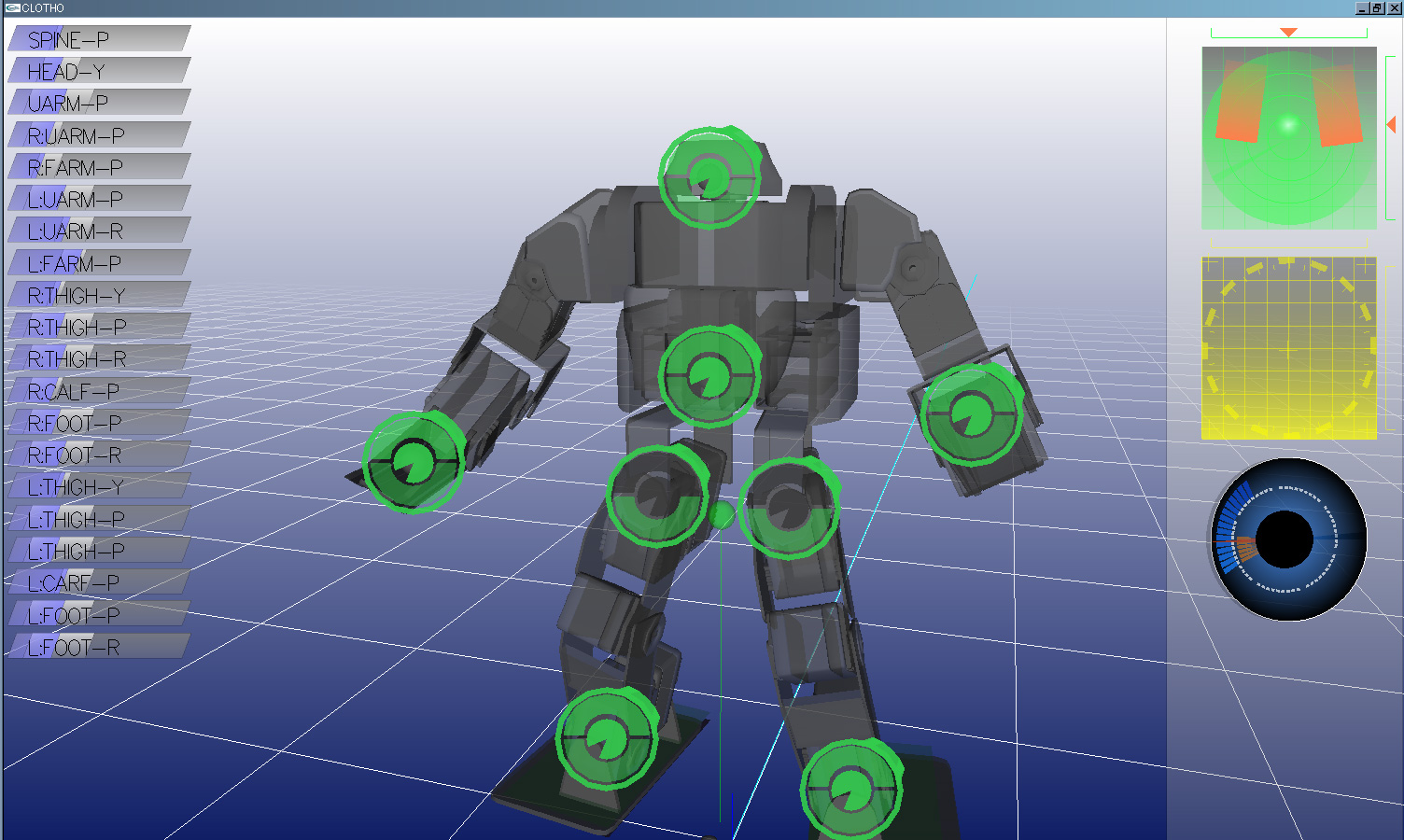
【シミュレータ】 - 接続設定タブのKinect開始ボタンを押す(NiUserTrackerが立ち上がる)
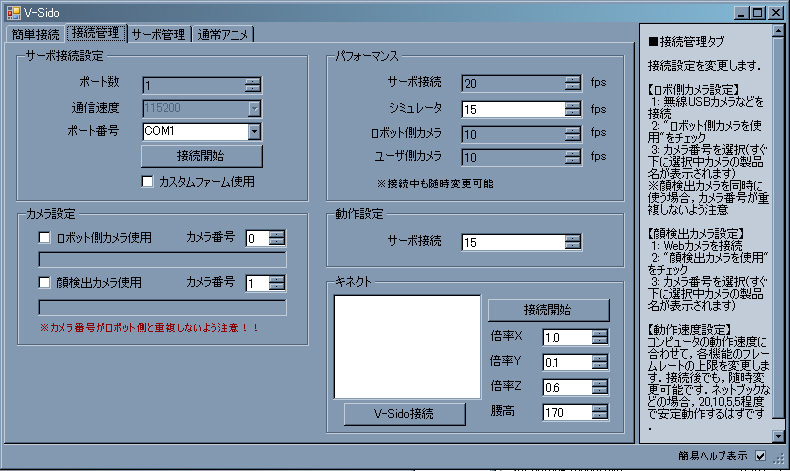
【接続設定タブ】 - キャリブレーションポーズを認識させる(シミュレータのロボットが連動する)
【Kinect NiUserTracker】
※ プログラムを終了する際には,各ウィンドウについて右上の終了ボタンを押してください.
■RS232c - USB変換ケーブルの準備
各製品の説明書に従い,ドライバを導入してください.セットアップが終わったらケーブルのCOM番号を調べます. もしCOM番号がCOM1以外であった場合,設定をするときに使い勝手が良くないので, ここなどを参考に "COM1"に設定しなおすことをおすすめします.【RS232c - USB変換ケーブル】
■V-Sidoとロボットの接続
実際にロボットを動かします.NiUserTrackerがキャリブレーション完了する瞬間に急な転倒の可能性がありますので,できるだけ,だれか1名ロボットのそばにいてください.- RS232c-USB変換ケーブルでコンピュータとロボットを接続する
- Kinectをコンピュータに接続する
- v_sido0.2/bin/v_sido.exeを起動する
- 起動画面でCOMポートを設定する(デフォルトでCOM1)
- 「簡単接続」ボタンを押す(シミュレータが立ち上がる)
- ロボットの電源を入れて直立させる

- 接続設定タブのKinect開始ボタンを押す(NiUserTrackerが立ち上がる)
- キャリブレーションポーズを認識させる(ロボットが連動する)
※ 本ソフトは,GR-001の販売元であるhpi社,サーボ開発元である双葉電子工業とは関係ありません.
※ 本ソフトに関するお問い合わせは吉崎(ikaziso(アットマーク)yahoo.co.jp)へお願いします.
※ 本ソフトの使用は自己責任でお願いします.
※ 本ソフトに関するお問い合わせは吉崎(ikaziso(アットマーク)yahoo.co.jp)へお願いします.
※ 本ソフトの使用は自己責任でお願いします.